四、TacoAI 应用
先安装 tps-test 下载测试资源,命令如下:
sudo apt update && sudo apt install tps-test
测试资源位于 /usr/data 目录下:
root@em20-dk:~# ls /usr/data/
automation dvfs gpiozero npu suspend vdec
ddr ffmpeg ids otp taco-pipeline-1.0.0 venc
deb fio libcv qa tps_pipeline
distro gmac multicore sound usb
4.1 编码
视频编码测试命令是 taco_venc_simple_example,主要用于将 YUV 数据编码成 H.264 数据。测试资源为 /usr/data/venc/1920x1080_420p_10f.yuv(10 帧,1080P,YUV420p 格式数据)。使用说明如下:
taco_venc_simple_example -i <input_file> <threads> <cycles> <loops> <frames> <save> <pixformat> <pp>
参数说明:
| 选项 | 说明 | 默认值 |
|---|---|---|
-i <file> | 输入 YUV 视频文件路径 | /usr/data/venc/1920x1080_420p_10f.yuv |
-t <num> | 编码线程数(1‑32) | 1 |
-c <num> | 编码测试周期数(≥1) | 1 |
-l <num> | 每个周期的编码循环次数(≥1) | 1 |
-f <num> | 每个循环的编码帧数(≥1) | 10 |
-s <0/1> | 是否保存输出码流(0=否,1=是) | 1 |
-p <num> | 输入像素格式(0=YUV420P, 1=NV12, 2=NV21, …) | 0 |
-m <0/1> | 预处理模式(0=正常,1=启用) | 0 |
-h | 显示帮助信息 |
示例命令:
root@em20-dk:~# taco_venc_simple_example -t 4 -c 1 -l 1 -f 10 -s 1
TACO Video Encoder Configuration:
Input file: /usr/data/venc/1920x1080_420p_10f.yuv
Threads: 4
Encoder cycles: 1
Loops per encoder: 1
Frames per loop: 10
Save file: yes
Pixel format: 0
Pre-processing mode: disabled
Total frames per thread: 10
TACO VENC Multi-threaded Test Configuration:
Threads: 4
Encoder cycles: 1
Loops per encoder: 1
Frames per loop: 10
Save file: yes
Pixel format: 0
PP encode: no
Total frames per thread: 10
Thread 3 - Cycle 1 - Loop 1: FPS: 40.95, Frames: 10, Streams: 10
Thread 1 - Cycle 1 - Loop 1: FPS: 53.63, Frames: 10, Streams: 10
Thread 3: Completed
Thread 1: Completed
Thread 2 - Cycle 1 - Loop 1: FPS: 46.16, Frames: 10, Streams: 10
Thread 0 - Cycle 1 - Loop 1: FPS: 35.68, Frames: 10, Streams: 10
Thread 2: Completed
Thread 0: Completed
All threads completed
输出文件名为 output_thread_0.h264、output_thread_1.h264、output_thread_2.h264、output_thread_3.h264。
输出日志解析:
- 编码配置:显示编码器配置信息,包括输入文件、线程数、编码周期、循环次数、帧数、保存选项等。
TACO Video Encoder Configuration:
Input file: /usr/data/venc/1920x1080_420p_10f.yuv
Threads: 4
...
TACO VENC Multi-threaded Test Configuration:
Threads: 4
...
- 编码性能:每个线程在每个周期和循环中的编码帧率(FPS)、处理的帧数以及生成的码流文件数。
Thread 3 - Cycle 1 - Loop 1: FPS: 40.95, Frames: 10, Streams: 10
Thread 1 - Cycle 1 - Loop 1: FPS: 53.63, Frames: 10, Streams: 10
...
- 编码完成:所有线程编码完成后的提示。
All threads completed
4.2 解码
视频解码测试命令是 ppvdec,主要用于将 H.264、H.265 或 JPEG 数据解码成 YUV 或 RGB 数据。测试资源位于 /usr/data/vdec 目录下。使用说明如下:
ppvdec decode_mode <线程数> <循环次数> <解码周期> <帧数> <保存文件> [解码类型] [分辨率] [PP模式]
参数说明:
线程数:解码线程数量(1-32)循环次数:外层循环数量解码周期:每个线程的解码循环数量帧数:每轮循环需要解码的帧数保存文件:1 = 保存 YUV 文件,0 = 不保存解码类型:0 = H.264,1 = H.265分辨率:0 = 1080p,1 = 4KPP模式:0 = 仅 PP0,1 = 仅 PP1,2 = 双通道
示例命令:
root@em20-dk:~# ppvdec decode_mode 1 1 1 10 1 0 0 0
Signal handlers installed (SIGINT, SIGTERM)
=== [ppvdec running from test_taco_vdec.c] ===
=== Legacy Mode Configuration ===
Codec: H.264
Resolution: 1080p
PP Channel: Channel0 only
Save YUV: Enabled
Stream Files Used:
H.264 1080p: /usr/data/vdec/stream_1920x1080.h264
H.264 4K: /usr/data/vdec/stream_3840x2160.h264
H.265 1080p: /usr/data/vdec/stream_1920x1080.h265
H.265 4K: /usr/data/vdec/stream_3840x2160.h265
Starting single decode thread (no pthread)...
Thread 1 - PP Channel Configuration: mode=0, ch0=enabled, ch1=disabled
Thread 1 - Parsing stream file: /usr/data/vdec/stream_1920x1080.h265
Parsing H.265 /HEVC format
Parsed 1000 frames from video file
Thread 1 Loop 1: FPS: 2.63
Thread 1: 1 frames, FPS: 2.61
PASS
输出日志解析:
- 解码线程配置:显示每个线程的配置信息,包括模式和通道状态。
Thread 1 - PP Channel Configuration: mode=0, ch0=enabled, ch1=disabled
Thread 1 - Parsing stream file: /usr/data/vdec/stream_1920x1080.h264
- 帧解析:显示从视频文件中解析的帧数。
Parsed 1000 frames from video file
- 解码性能:显示每个线程的解码帧率(FPS)。
Thread 1 Loop 1: FPS: 2.63
Thread 1: 1 frames, FPS: 2.61
4.3 NPU 模型运行
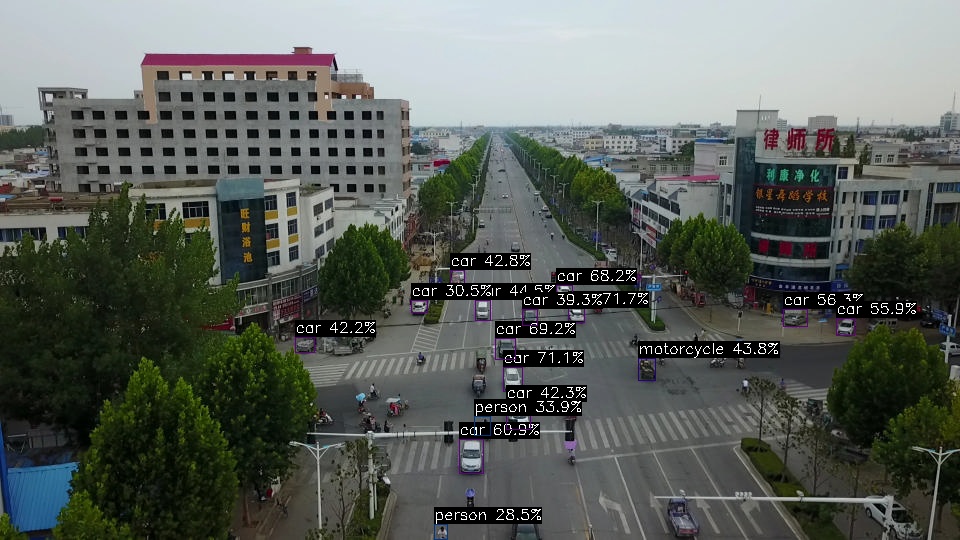
本例程基于官方 YOLO11 模型,经过优化和适配,可在 AIBOX 硬件平台上高效运行,用于实现对 80 种常见物体的实时检测。本例程提供的预编译模型为 INT8 量化模型(.nb 格式),旨在平衡检测精度与推理速度。项目代码通过 taRuntime 加载并执行 .nb 模型,利用 OpenCV 进行图像的预处理和后处理。
4.3.1 测试环境准备
准备一台 PC 作为 host 机,并配备 Ubuntu 系统和 Python 环境。AIBOX 平台作为 device 机,已预装 Ubuntu 系统和 SDK。
访问 Model Zoo 官方 Gitee 或 Model Zoo 官方 Github,下载官方提供的算法示例。
以 YOLO11 模型为例,通过运行 samples/YOLO11_det/scripts/ 目录下的 download.sh 脚本,获取例程所需的模型、数据与脚本等内容。
chmod +x download.sh && ./download.sh
下载内容:
models/
├── datasets.txt
├── yolo11s_float16.nb
├── yolo11s.onnx
├── yolo11s_int8.nb
├── yolo11s_config_fp16.json
└── yolo11s_config_int8.json
test_images/ # 测试用图片
├── input1.jpg
├── input2.jpg
├── input3.jpg
├── input4.jpg
└── input5.jpg
datasets/
├── val2017_1000 # coco val2017中随机抽取的1000张样本
└── instances_val2017_1000.json # coco val2017中随机抽取的1000张样本对应的标注信息
通过TACO SDK搭建交叉编译环境,使用交叉编译工具链编译生成可执行文件yolo11s_det_soc:
cd cpp
mkdir build && cd build
cmake ..
make
在 AIBOX 板端新建模型文件夹 yolo11,并通过 scp 命令将数据从 host 机复制到该目录下,复制完成后 yolo11 目录结构如下:
yolo11
├── test_images # 测试集图片
│ ├── input1.jpg
├── models
│ └── yolo11s_int8.nb # .nb 模型
| └── yolo11s_float16.nb
└── yolo11s_det_soc # 例程程序
4.3.2 单图推理
YOLO11s INT8 模型
在 yolo11 目录下运行 INT8 模型:
root@em20-dk:~/yolo11# ./yolo11s_det_soc --input=test_images/input1.jpg --model=models/yolo11s_int8.nb
--------------------------------------
Single Image Inference Mode
Model: models/yolo11s_int8.nb
Input: test_images/input1.jpg
Output: output.jpg
Conf thresh: 0.25
NMS thresh: 0.45
--------------------------------------
Input num: 1, Output num: 3
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 4
dim_size: | [640, 640, 3, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 998277230
quant_data (affine):
tf_scale: | 0.003922
tf_zero_point: | -128
name: | uid_30000_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 3
dim_size: | [6400, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1044353412
quant_data (affine):
tf_scale: | 0.187079
tf_zero_point: | 23
name: | uid_30001_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 1
dim_count: | 3
dim_size: | [1600, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1048615530
quant_data (affine):
tf_scale: | 0.251178
tf_zero_point: | 66
name: | uid_30002_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 2
dim_count: | 3
dim_size: | [400, 144, 1]
data_format: | 3
quant_format: | 2
quant_data (dfp):
fixed_point_pos: | 1046139268
quant_data (affine):
tf_scale: | 0.213691
tf_zero_point: | 70
name: | uid_30003_out_0
--------------------------------------------------------------
Model initialized successfully
--------------------------------------
Detected 16 objects
===== Time Statistics =====
Image read time: 113.72 ms
Preprocess time: 89.49 ms
Inference time: 15.48 ms
Postprocess time: 57.66 ms
Total time: 276.36 ms
============================
Output saved to: output.jpg
--------------------------------------
Model deinitialized
输出日志解析:
- 使用模型:models/yolo11s_int8.nb
- 输入图像:test_images/input1.jpg(input1.jpg 可换成自定义 jpg 文件)
- 输出图像:output.jpg
- 输入图像的尺寸:640x640 像素(预处理后)
- 性能统计:
- 读图+解码: 113.72 ms,占比 44.19%
- 预处理:89.49 ms,占比 33.05%
- npu推理:15.48 ms,占比 5.07%
- 后处理:57.66 ms,占比 20.05%
- 总耗时:276.36 ms
- 检测结果:共 16 个对象,置信度 ≥ 0.25
- Inference FPS:≈ 64.6 fps(1000/15.48)
- 端到端 FPS:≈ 3.6 fps(1000/276)
- 状态:PASS
生成结果

YOLO11s FP16 模型
在 yolo11 目录下运行 FP16 模型:
root@em20-dk:~/yolo11# ./yolo11s_det_soc --input=test_images/input1.jpg --model=models/yolo11s_float16.nb
--------------------------------------
Single Image Inference Mode
Model: models/yolo11s_float16.nb
Input: test_images/input1.jpg
Output: output.jpg
Conf thresh: 0.25
NMS thresh: 0.45
--------------------------------------
Input num: 1, Output num: 3
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 4
dim_size: | [640, 640, 3, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | input/output[0]
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 0
dim_count: | 3
dim_size: | [6400, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_5_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 1
dim_count: | 3
dim_size: | [1600, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_4_out_0
--------------------------------------------------------------
--------------------------------------------------------------
Tensor Attribute index: | 2
dim_count: | 3
dim_size: | [400, 144, 1]
data_format: | 1
quant_format: | 0
quant_data (dfp):
fixed_point_pos: | 0
quant_data (affine):
tf_scale: | 0.000000
tf_zero_point: | 0
name: | uid_3_out_0
--------------------------------------------------------------
Model initialized successfully
--------------------------------------
Detected 16 objects
===== Time Statistics =====
Image read time: 90.98 ms
Preprocess time: 44.19 ms
Inference time: 24.61 ms
Postprocess time: 51.13 ms
Total time: 210.91 ms
============================
Output saved to: output.jpg
--------------------------------------
Model deinitialized
输出日志解析:
- 使用模型:models/yolo11_float16.nb
- 输入图像:test_images/input1.jpg(input1.jpg 可换成自定义 jpg 文件)
- 输出图像:output.jpg
- 输入图像的尺寸:640x640 像素 (预处理缩放后)
- 性能统计:
- 读图+解码:90.98 ms,占比 44.19%
- 预处理:44.19 ms,占比 44.19%
- npu推理:24.61 ms,占比 24.61%
- 后处理:51.13 ms,占比 51.13%
- 总耗时:210.91 ms
- 检测结果:共 16 个对象(置信度 ≥ 0.25)
- Inference FPS:≈ 40.7 fps(1000/24.61)
- 端到端FPS:≈ 40.7 fps
- 状态:pass
生成结果
4.3.3 模型性能评测
基于单图推理测试结果,我们进行了性能对比分析:
性能对比表格
| 模型名称 | 输入图像 | 输出图像 | 读码解码时间(ms) | 预处理时间(ms) | NPU推理时间(ms) | 后处理时间(ms) | 总耗时(ms) | 推理FPS | 端到端FPS |
|---|---|---|---|---|---|---|---|---|---|
| YOLO11s INT8 | input1.jpg | output.jpg | 113.72 | 89.49 | 15.48 | 57.66 | 276.36 | 64.6 | 3.6 |
| YOLO11s FP16 | input1.jpg | output.jpg | 90.98 | 44.19 | 24.61 | 51.13 | 210.91 | 40.6 | 4.7 |
性能分析
- NPU 推理性能:INT8 模型推理耗时仅 15.48 ms,相比 FP16 模型的 24.61 ms 提升了约 59%,INT8 量化在 NPU 上优势明显。
- 端到端性能:尽管 INT8 推理更快,但整体端到端耗时(276.36 ms)反而高于 FP16(210.91 ms),主要原因是 INT8 版本在图像读码解码和预处理阶段耗时较多(合计 203.21 ms,占 73.5%)。这使得 FP16 的端到端 FPS(4.7 fps)反而高于 INT8(3.6 fps)。
- 瓶颈定位:无论 INT8 还是 FP16,前后处理时间占总耗时的 80% 以上(INT8 为 88%,FP16 为 80%),说明当前 pipeline 的瓶颈在于图像读码、预处理和后处理阶段。后续优化应聚焦于 DMA-BUF 零拷贝、多线程流水线以及降低输入分辨率等方法,以进一步提升端到端性能。
结论
- INT8 量化在 NPU 推理速度上具有显著优势(+59%),适合对单帧推理延迟敏感的应用。
- 端到端整体性能受前后处理制约较大,FP16 模型因预处理时间更短而获得更高的整体帧率。
- 后续工作需重点优化数据流 pipeline,以充分发挥 NPU 的算力潜力。